为何所有的示波器采集存储器并非都相同
本文将讨论:
示波器采集存储器的重要性
不同的示波器架构以及各个架构的优缺点
使用不同方法以便充分利用您的示波器采集存储器
大部分人不会嫌他们的汽车太省油,或是嫌他们的房子太宽敞。同样地,大多数示波器用户总是会觉得示波器的采集存储器不够大。但是,正如您在汽油油耗(比如加速较慢)或住房面积上(供暖和制冷费用)的权衡一样;考虑到示波器的架构,您可能也会对更高的采集存储器做出最契合实际的取舍。
示波器采集存储器的重要性
采集存储器是示波器的重要组成部分。在简易的示波器中,采集存储器是由一个负责采集模拟信号的前端组成;随后将这个信号发送到模数转换器进行数字化处理。在数字化之后,信号的信息会被储存到存储器(采集存储器)中,然后进行处理和绘制/显示。示波器的采集存储器与采样率直接挂钩。存储器的容量越大,示波器的采样率就会越高,您就能捕获更长时间的波形。采样率越高,示波器的有效带宽就会越高(有效是指高达示波器前端的最大带宽)。
那么,存储器越深,示波器的性能就越好吗?一切顺利的话,答案则是肯定的。我们来对比一下两款具有相近技术指标的示波器(除存储器深度之外)。一款 1 GHz 示波器拥有 5GS/s 采样率和 4,000,000 个点(4Mpts)的采集存储器(我们称其为“MegaZoom 架构”)。另一款 1 GHz 示波器拥有 5GS/s 采样率和 20,000,000 个点(20Mpts)的采集存储器(我们称其为“基于 CPU 的架构)。”表 1 显示了常用的时基设置与采样率。在给定的具体时基设置和具体存储器容量条件下(假设屏幕上有 10 格,示波器不会捕获到屏幕外的数据),经过简单的计算可以确定采样率。
存储器深度/((时间/格设置)* 10 格)= 采样率(高达 ADC 的最大采样率)。例如,假设时基设置是 160uS/格,最大存储器深度为 4,000,000 个样本。算出的采样率是 4,000,000/((160uS/格)* 10 格)= 2.5GS/s。
如表 1 所示,当您采用较慢的时间/格设置时,存储器越深,采样率就越高。保持高采样率很重要,因为高采样率可使示波器以最大功能运行。拥有 5GS/s 采样率的示波器可以有范围很宽的存储器深度,从 10,000 个点(10Kpts)到 1,000,000,000 个点(1Gpts)。
示波器架构
深存储器对采样率有很大助力,那么在什么情况下它不再有这项优势?如果深存储器拖慢了您的示波器速度,从而不利于调试问题,那么它就不再有帮助。因为深存储器会给系统带来很大负担。有些示波器能够很好地处理这个问题,并且对快速更新速率保持响应;尽管其他示波器厂商会将其指定为宣传性的技术指标,其实深存储器实际上并不方便使用且导致更新速率降低了几个数量级。
更新速率(“静寂时间”的倒数)反映了示波器触发、处理已捕获的数据以及在屏幕上显示数据的速度。更新速率越快(或静寂时间越短),您捕获偶发事件的可能性就越大。许多年前,人们往往把快速更新速率与模拟示波器挂钩。幸运的是,新的示波器架构——例如 Keysight MegaZoom IV——允许更新速率超过去那些年速度最快的模拟示波器。
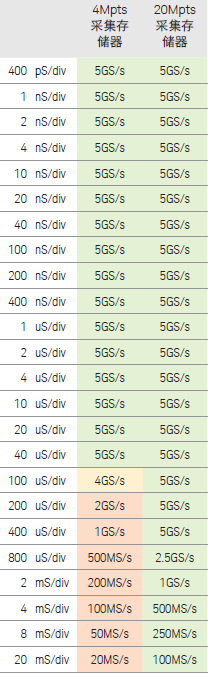
表 1:两台完全相同的示波器具有不同的存储器深度,它们在常用的时间/格设置下的采样率。
我们看一下上面提到的两台完全相同的示波器。快速时基设置为 20nS/格时,两台示波器都能接近更新速率的最大值,它们不会使用技术资料中规定的完整存储器。然而,当时基设置为 400nS/格时会怎样?基于 MegaZoom 架构的示波器会自动扩大它的存储器深度,使采样率透支。示波器将完全按照您所期望的深存储器示波器那样运行( 它的采样率将保持在 5GS/s,并且提供快速更新速率)。基于 CPU 架构的示波器仍然使用默认的存储器深度,使示波器保持出色的响应,但是它的采样率没能维持在正常水平(同时提供较慢的更新速率)。如果我们通过调整存储器深度使采样率居高不下,又会出现什么情况?您会看到当一台深存储器示波器不能处理深存储器问题时所进行的权衡;用户必须进行干预,把存储器深度设置得更高一些,从而使采样率达到最大值(5GS/s),但是更新速率为 MegaZoom 示波器的六分之一。在较慢的时基设置(例如 4uS/格,MegaZoom 示波器的更新速率几乎是 CPU 示波器的 20 倍以上。)情况只会变得更糟。
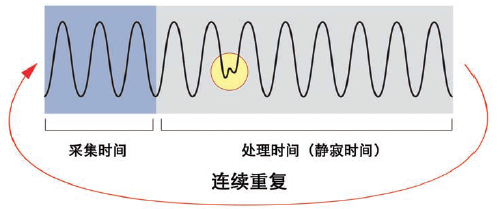 图 1:示波器的静寂时间可以隐藏罕见事件。更快的更新速率(静寂时间的倒数)能够帮助您提高找到偶发事件的概率。
图 1:示波器的静寂时间可以隐藏罕见事件。更快的更新速率(静寂时间的倒数)能够帮助您提高找到偶发事件的概率。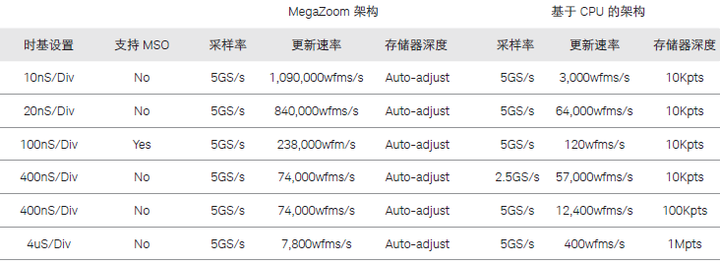 表 2:对比更新速率、采样率和存储器深度。
表 2:对比更新速率、采样率和存储器深度。什么使一台示波器“能够从容应对”深存储器?其他的示波器必须要把存储器默认设置为 10K 以便保持响应?归根结底是示波器的架构。对于有的示波器,CPU 系统是示波器架构不可分割的一部分(“基于 CPU 的架构”),假如 CPU 系统无法胜任处理深存储器采集记录的任务,那么它其实是示波器处理信息并在屏幕上显示结果的速度的一个门槛;该系统将延长示波器处理和显示数据的时间,从而降低示波器的更新速率(有时降低幅度很大)。架构实例如图 2 所示。
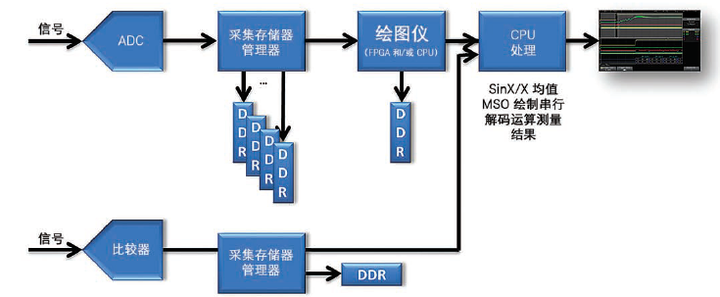 图 2:基于 CPU 的架构图显示了 CPU 系统是整体波形绘图的瓶颈。(基于CPU系统)
图 2:基于 CPU 的架构图显示了 CPU 系统是整体波形绘图的瓶颈。(基于CPU系统)不过幸运的是,还有其他的方法。专为深存储器而设计的示波器使用了定制 ASIC,所以 CPU 系统在示波器中变得可有可无。这里还会有 CPU 系统吗?当然有,但是现在的 CPU 系统是用来在外围进行数据处理,可使示波器关注它擅长的领域:波形显示。图 3 显示了Keysight InfiniiVisionX 系列示波器的创新架构,它采用了定制 ASIC(称之为 MegaZoom IV),以提供快速更新速率,同时使存储器容量和采样率最大化。
存储器和示波器架构是相互交织的,所以有些问题即便是默认的 10K 基本存储器深度也无法修复。例如,示波器在过去 15 年里的最显著增强之一就是数字通道的出现,不过不是所有的数字通道都由同一种方式实现。在我们先前讨论的基于 CPU 的架构中,接通数字通道将导致示波器的速度变慢,更新速率永远不会超过 125 个波形/秒,不论存储器深度或时基设置如何(参见表 2 中的 100nS/格实例)。这要比制造商规定的最大更新速率慢上几个数量级。原因是什么?根本上讲,还是因为示波器的架构。如图 2 所示,MSO 通道并没有很好地集成到 CPU 架构,这意味着 CPU 系统在绘制通道上要发挥更大的作用。使用 MegaZoom 架构(图 3),您可以看到数字通道成为了定制 ASIC 的不可或缺部分,ASIC 负责绘制和显示所有通道。在 MegaZoom 架构中,接通数字通道不会对示波器的速度产生很大的影响。其他一些常见方案(例如 Sinx/x 内插)也会导致 CPU 系统的速度变慢——示波器在打开和关闭 Sinx/x 内插时,时基设置发生变化,此时您会发现更新速率大幅降低(参见表 2 中的 10nS/格实例)。MegaZoom 架构不会遇到这类问题。
CPU系统的另一项不足是示波器的响应能力。您曾经改变过深存储器示波器中的时基设置,然后再等待示波器对其作出响应吗?或者,您曾经设法去更新一个设置,但是示波器对其响应非常缓慢,然后您偶然点击得到了您想要的设置?这是因为 CPU 系统正在处理这些数据——同一个拖慢更新速率的问题也会使示波器的响应能力下降。
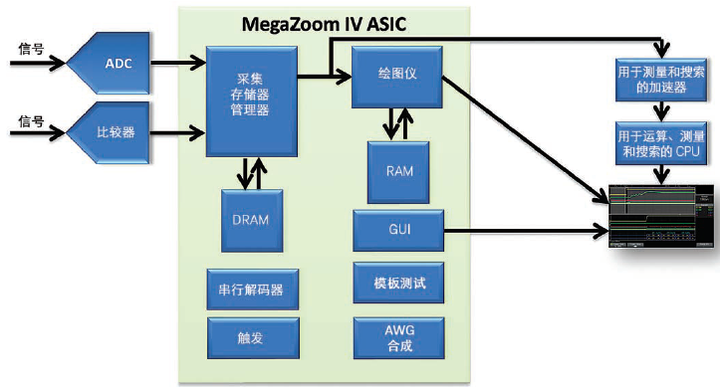 图 3:配有定制 ASIC 的 MegaZoom 架构正在对采集存储器中的波形进行绘制。
图 3:配有定制 ASIC 的 MegaZoom 架构正在对采集存储器中的波形进行绘制。充分利用您的示波器存储器
到现在为止我们所讨论的都是示波器运行以及示波器执行某种功能(例如调试)的几种模式。如果您只是进行单次采集,那么深存储器是不是更好的选择?您在执行单次采集时无需使用快速更新速率,而且在数据全部被捕获和显示之后,示波器的响应能力应当更出色。这看起来像是一个符合逻辑的结论,它在某些情况下是成立的;但如果您要处理的信号包含大量猝发信息,并且猝发信息之间有明显的空闲时间(例如雷达脉冲或正在发送帧/数据包的串行总线),情况会怎样?使用传统的深存储器示波器,您不得不应用所有的存储器去采集数字化的空闲时间和猝发信息 — 但由于您可能只关注信号猝发本身,这不是对存储器的理想应用方式。有的示波器提供一个具有“分段”存储器功能的存储系统。分段存储器允许您仅对所关注的波形部分进行数字化和存储,使您能够更高效地使用深存储器。
我们通过一个例子来了解一下分段存储器的优点。从图 4 中可以看到,两个射频脉冲信号间隔了很长的空闲时间。使用传统的深存储器示波器,我们不得不数字化并储存这些猝发和空闲时间。如图 4 所示,示波器所用的采样率(通常以 5GS/s 的速度进行采样)只有 313MSa/s — 我们此时仅捕获到两个脉冲!假如我们想要捕获 250 个脉冲,会发生什么情况?此时,采样率降至 10MS/s 以下,脉冲因为经过了严格的欠采样所以无法被识别。如果我们想要以 5 GS/s 的速度去捕获 250 个脉冲及所有的空闲时间,我们可能需要一台提供 5.0 G 存储器(5,000,000,000)的示波器。目前,市面上的示波器无法提供这样深的存储器。借助分段存储器,我们能够仅对所关注的波形部分进行数字化(猝发本身),并忽视猝发间的所有空闲时间。图 5 显示了使用分段存储器捕获到的第一个射频脉冲信号。注意,此时的采样率为 5GS/s,每个分段都被盖上了时间戳,所以您能够知道涉及初始触发的具体发生时间。图 6 显示了第 250 个脉冲和它的时间戳(996.004ms)。示波器可以让您浏览每个分段并进行分析(当您在一个串行总线上应用分段存储器时,您可以对每个分段中的数据包/帧进行解码)。
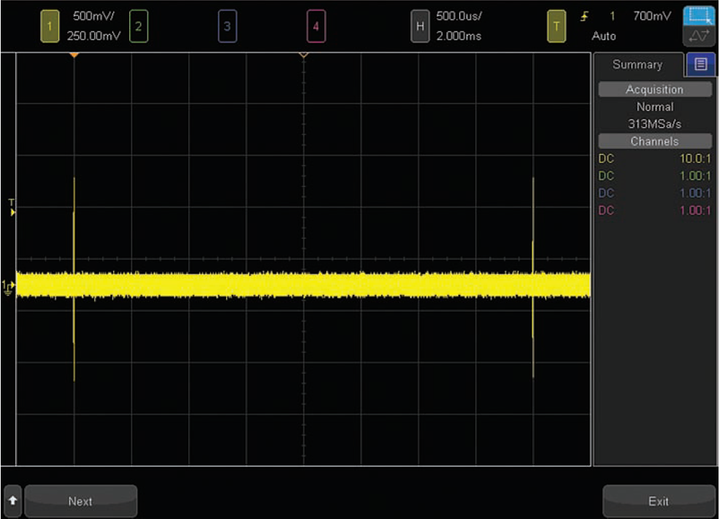 图 4:两个射频脉冲信号在时间中扩散。注意:示波器使用较低的采样率,正在对脉冲和其中的空闲时间进行数字化。
图 4:两个射频脉冲信号在时间中扩散。注意:示波器使用较低的采样率,正在对脉冲和其中的空闲时间进行数字化。通过使用 MegaZoom 架构和智能型分段存储器,用户不仅能够获得快速响应的示波器,而且还能获得超深存储器示波器的时间捕获功能。
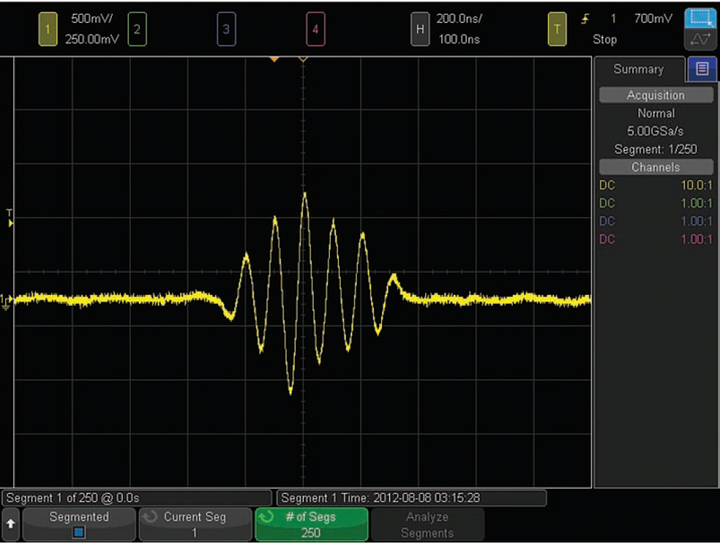 图 5:使用分段存储器捕获到的第一个射频脉冲信号(总计 250 个)——注意:与图 4 中使用传统方法去捕获两个脉冲(313MSa/s)相比,示波器所用的采样率(5GS/s)更高。
图 5:使用分段存储器捕获到的第一个射频脉冲信号(总计 250 个)——注意:与图 4 中使用传统方法去捕获两个脉冲(313MSa/s)相比,示波器所用的采样率(5GS/s)更高。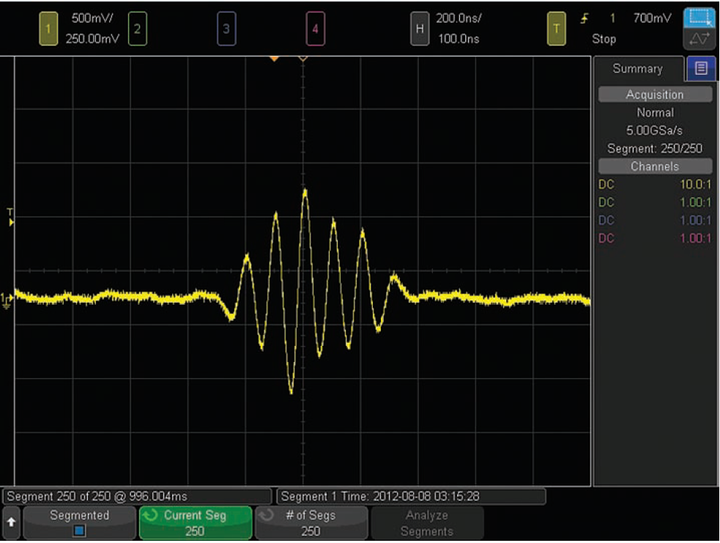 图 6:使用分段存储器捕获到的最后一个射频脉冲信号(#250)——注意:示波器保持了 5GS/s 采样率,经过时间约为 1 秒。
图 6:使用分段存储器捕获到的最后一个射频脉冲信号(#250)——注意:示波器保持了 5GS/s 采样率,经过时间约为 1 秒。总结
尽管标示了高采集存储器的技术资料很有诱惑力,但是您应当认真考虑您要如何去使用示波器。在某些情况下可能最适合选择尽可能深的存储器,但在大多数情况下,一台专为深存储器而设计的示波器是更好的选择,它会减少因运行停滞或操作模式怪异所引起的挫败感。此外,在高效利用示波器存储器方面也有其他一些新的进展,能够显著增强您的示波器功能。